

Current Research
Coordinated control of communication-enabled mobile robots and vehicles
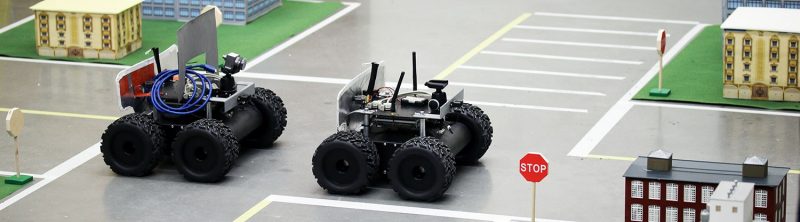
Our mobile robots emulate autonomous and connected vehicles with vehicle-to-vehicle (V2V), Vehicle-to Infrastructure (V2I) and Vehicle to other entities (V2X) (such as road users, pedestrians, bicyclists, etc.) communications. These robots are equipped with various sensors and on-board processors which are linked to other robots/vehicles and the surrounding environment. We are developing and evaluating hybrid hierarchical control algorithms for autonomous driving, platooning, merging, collision avoidance, and several other dynamic coordinated functions of intelligent vehicles and robots in complex environments.
Advanced driver assistance systems
The work of our lab in advanced driver assistance systems (ADAS) and active safety also includes a special interest in mixed mode of autonomous and manual driving. In one area, we seek to understand driver cognitive perception-response abilities through brain, eye, and physiological monitoring; and modeling human motor control actions. In-depth understanding of the driver’s perception response to external stimuli enables development of more coherent and rational ADAS, thus leading to more intelligent vehicles. These vehicles appropriately interact with drivers as needed and augment driving functions automatically as a continuously supporting co-pilot. Driving, due to its complexity and involvement of continuous sensing, decision making, and perception-response tasks; is a suitable testbed for brain monitoring studies. Furthermore, part of our research discoveries would be equally useful and applicable to other brain-controlled tasks and functions such as limb control, patient rehabilitation, and brain control of machines.

Azim Eskandarian, D.Sc.
Dean of College of Engineering
William H. Goodwin Jr. Endowed Chair
Virginia Commonwealth University (VCU)
eskandariana@vcu.edu
Editor-in-Chief of IEEE Transactions on Intelligent Transportation Systems (ITS)